This story originally appeared at InnerFidelity.comBack before the Sennheiser HD 800 broke the $1000 high-end headphone barrier and started a flurry of ground-breaking new reference cans, there were three staples for enthusiast searching for great sound: the Sennheiser HD 650 ($649.95 MSRP); the AKG K701 (now reincarnated as the Quincy Jones Q701; $399 MSRP); and the Beyerdynamic DT 880 ($313.95 MSRP). All three, in my mind, remain good value when properly chosen for your listening tastes. (HD 650 – warm and smooth, though somewhat lacking in detail; AKG K701 – articulate, but slightly hard; DT 880 – detailed with depth and air, but somewhat lacking weight through the mids.)
A rather cool and unusual feature of the Beyer DT 880 is that it is available in three different impedance values in order to give you better options in suiting them to your needs. I thought it would be fun to have a look at the three different versions, and evaluate their suitability to home, portable, and general use.
Read on for the techno-geekly details, but go ahead and skip to the summary if you just want the recommendations….
The Import of Headphone Impedance and Damping
In order to understand why you would choose one of these various impedance DT 880s over the others, you’ll have to know a little about “damping,” and how it works. Imagine a pendulum made of a steel rod pivoting freely at the top and with a canon-ball welded to the bottom. Push the rod, and it will swing back and forth for a while, slowly loosing energy to the minimal friction of the pivot and the air-resistance, resulting in ever-smaller swings until it comes to rest. The frequency of its swing is the systems resonant frequency; and the ongoing oscillations characterize this as an undamped system. Now attach a pushrod and a small electric motor to the pendulum, and drive it at the resonant frequency. Because that’s the natural speed of the swing, it will move easily. But try to drive it faster or slower, and the pendulum will want to swing at its own rate and it will “fight back” against the motor. If the motor is weak, the resulting swings will neither be what the motor wants to do, nor the natural resonant swinging of the pendulum, but rather, will be a complex result of the interaction of the two. This system is poorly damped.
Now imagine a huge motor attached to the pendulum. In this case the motor is so big that it hardly feels the pendulum’s moment at all. The motor will be able to do what ever it wants regardless of whether it’s near the resonant frequency or not. The large available horsepower of the motor “damps” the pendulum’s natural moments.
Rather than talk about swinging the pendulum at various frequencies, let’s talk about two special case signals: impulse response and square wave response. Impulse response is like taking the pendulum at rest, and then moving it hard in one direction and back to the rest position as fast as possible. Square wave response is like holding the swing half way up one side, and then moving it as fast as possible to half way up the other side, and then stopping and holding it there, and then going back to the first side as fast as possible. The thing both signals have in common is very rapid movement to a fixed position. Good damping is that which allows those rapid transitions to happen as quickly and as accurately as possible.
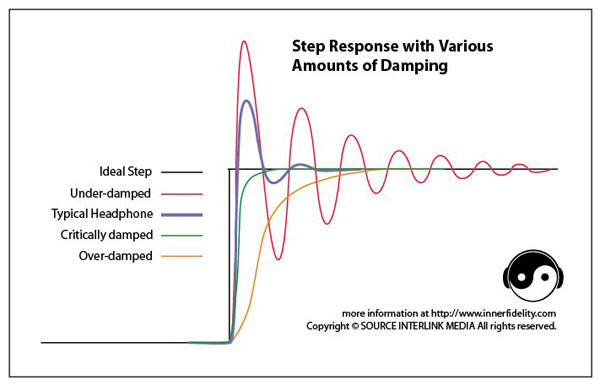 The above graph shows various system responses to a step function (essentially one transition of a square wave). An under-damped system (red) will permit oscillations to continue for some time. An over-damped system (orange) will be slow to respond. A critically damped system will get where it needs to go quickly without the ringing oscillations. The problem is that a critically damped system needs to be implemented with a servo circuit with lots of special feedback (proportional/integral/derivitive controls)directly from the driven device. In a simple system where there is no direct feedback, some overshoot is required to get the system to respond quickly. Therefore, with headphones, it is normal and desirable to have a quickly damped ring (blue) at the leading edges of the signal.
A headphone driver is somewhat like this pendulum: Use an electric current to push it away from rest, it fights back. The nature of this struggle is partly evident in the impedance and phase responses of the headphone. Let’s look at a few headphones:
The above graph shows various system responses to a step function (essentially one transition of a square wave). An under-damped system (red) will permit oscillations to continue for some time. An over-damped system (orange) will be slow to respond. A critically damped system will get where it needs to go quickly without the ringing oscillations. The problem is that a critically damped system needs to be implemented with a servo circuit with lots of special feedback (proportional/integral/derivitive controls)directly from the driven device. In a simple system where there is no direct feedback, some overshoot is required to get the system to respond quickly. Therefore, with headphones, it is normal and desirable to have a quickly damped ring (blue) at the leading edges of the signal.
A headphone driver is somewhat like this pendulum: Use an electric current to push it away from rest, it fights back. The nature of this struggle is partly evident in the impedance and phase responses of the headphone. Let’s look at a few headphones:
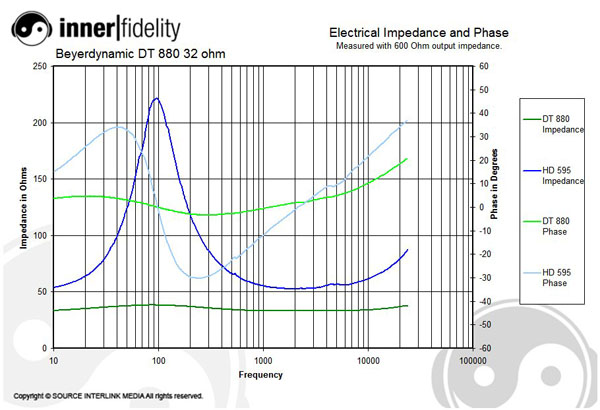 The graph above shows the impedance and phase response of the Beyerdynamic DT 880 and Sennheiser HD 595; both are considered relatively low impedance headphones at 32 ohms and 50 ohms respectively. Here you can see both have bumps in the impedance curves at around 100Hz, and that the DT 880 (dark green) is at about 38 ohms at it’s maximum, while the HD 595 (dark blue) has a significantly higher maxima at about 220 ohms. These bumps in impedance indicate the primary driver resonance. This is analogous to the pendulum’s natural swinging frequency, and is the point at which the headphone is hardest to control. The larger phase swings of the HD 595 (light blue) are indicative of the difficulty the amp will have driving the headphones, and shows significant amounts of opportunity for interaction between the two. The phase swings of the Beyerdynamic DT 880 (light green) are much less severe, making this an easier headphone to drive.
Going back to our original analogy, we will need a motor with more horsepower to drive the HD 595 as accurately as the DT 880. The motor, in this case, is the headphone amplifier; and its horsepower is the output characteristics needed for the amp to achieve a given listening volume without “feeling” the momentum of the headphone driver in the electro-motive forces represented by the larger phase angles of the HD 595. This is largely the headphone amplifier's output impedance (assuming it has the modest power and voltage needed to drive headphones)
The graph above shows the impedance and phase response of the Beyerdynamic DT 880 and Sennheiser HD 595; both are considered relatively low impedance headphones at 32 ohms and 50 ohms respectively. Here you can see both have bumps in the impedance curves at around 100Hz, and that the DT 880 (dark green) is at about 38 ohms at it’s maximum, while the HD 595 (dark blue) has a significantly higher maxima at about 220 ohms. These bumps in impedance indicate the primary driver resonance. This is analogous to the pendulum’s natural swinging frequency, and is the point at which the headphone is hardest to control. The larger phase swings of the HD 595 (light blue) are indicative of the difficulty the amp will have driving the headphones, and shows significant amounts of opportunity for interaction between the two. The phase swings of the Beyerdynamic DT 880 (light green) are much less severe, making this an easier headphone to drive.
Going back to our original analogy, we will need a motor with more horsepower to drive the HD 595 as accurately as the DT 880. The motor, in this case, is the headphone amplifier; and its horsepower is the output characteristics needed for the amp to achieve a given listening volume without “feeling” the momentum of the headphone driver in the electro-motive forces represented by the larger phase angles of the HD 595. This is largely the headphone amplifier's output impedance (assuming it has the modest power and voltage needed to drive headphones)
In order to understand why you would choose one of these various impedance DT 880s over the others, you’ll have to know a little about “damping,” and how it works. Imagine a pendulum made of a steel rod pivoting freely at the top and with a canon-ball welded to the bottom. Push the rod, and it will swing back and forth for a while, slowly loosing energy to the minimal friction of the pivot and the air-resistance, resulting in ever-smaller swings until it comes to rest. The frequency of its swing is the systems resonant frequency; and the ongoing oscillations characterize this as an undamped system. Now attach a pushrod and a small electric motor to the pendulum, and drive it at the resonant frequency. Because that’s the natural speed of the swing, it will move easily. But try to drive it faster or slower, and the pendulum will want to swing at its own rate and it will “fight back” against the motor. If the motor is weak, the resulting swings will neither be what the motor wants to do, nor the natural resonant swinging of the pendulum, but rather, will be a complex result of the interaction of the two. This system is poorly damped.
The above graph shows various system responses to a step function (essentially one transition of a square wave). An under-damped system (red) will permit oscillations to continue for some time. An over-damped system (orange) will be slow to respond. A critically damped system will get where it needs to go quickly without the ringing oscillations. The problem is that a critically damped system needs to be implemented with a servo circuit with lots of special feedback (proportional/integral/derivitive controls)directly from the driven device. In a simple system where there is no direct feedback, some overshoot is required to get the system to respond quickly. Therefore, with headphones, it is normal and desirable to have a quickly damped ring (blue) at the leading edges of the signal.
The graph above shows the impedance and phase response of the Beyerdynamic DT 880 and Sennheiser HD 595; both are considered relatively low impedance headphones at 32 ohms and 50 ohms respectively. Here you can see both have bumps in the impedance curves at around 100Hz, and that the DT 880 (dark green) is at about 38 ohms at it’s maximum, while the HD 595 (dark blue) has a significantly higher maxima at about 220 ohms. These bumps in impedance indicate the primary driver resonance. This is analogous to the pendulum’s natural swinging frequency, and is the point at which the headphone is hardest to control. The larger phase swings of the HD 595 (light blue) are indicative of the difficulty the amp will have driving the headphones, and shows significant amounts of opportunity for interaction between the two. The phase swings of the Beyerdynamic DT 880 (light green) are much less severe, making this an easier headphone to drive.
Going back to our original analogy, we will need a motor with more horsepower to drive the HD 595 as accurately as the DT 880. The motor, in this case, is the headphone amplifier; and its horsepower is the output characteristics needed for the amp to achieve a given listening volume without “feeling” the momentum of the headphone driver in the electro-motive forces represented by the larger phase angles of the HD 595. This is largely the headphone amplifier's output impedance (assuming it has the modest power and voltage needed to drive headphones)