| Columns Retired Columns & Blogs |
Wayward Down Deep Page 2
First, there is boundary reinforcement. This arises because, just as a bathroom mirror creates a virtual image of your face, the acoustic mirrors formed by a room's boundaries create virtual acoustic images of a sound source. If you place a loudspeaker near the corner of a room, there are actually effectively eight loudspeakers in close proximity: the real loudspeaker and seven virtual ones reflected in the walls and floor (fig.1). At low frequencies, the phase difference between these sources becomes negligible because of the long wavelength, so their outputs combine constructively. One boundary thereby adds 6dB to the sound-pressure level, two boundaries add 12dB, and three boundaries add 18dB, assuming that they reflect perfectly and that the loudspeaker's radiation is omnidirectional (which at low frequencies is usually the case, dipole speakers being the obvious exceptions). You will often see it stated that a single boundary adds 3dB, two boundaries 6dB, and three boundaries 9dB, but these figures represent the increase in sound power, not sound pressure.
Footnote 4: J. Robert Stuart, "Active Loudspeakers," AES 21st UK Conference, April 2006.

Fig.1 Image-source model of a sound source in a room corner. The yellow ball represents the source position, the other seven balls the additional virtual sources formed by reflections from the walls and floor. Those colored blue are reflected in a single surface, those colored red in two or three surfaces.
The ramifications of this tend to differ according to whether you consider a full-range speaker or a satellite-subwoofer system. With a full-range speaker, there is the prospect of using boundary reinforcement to extend the effective LF bandwidth, although in practice this isn't as simple as it sounds. With a subwoofer we can learn the lesson taught by Roy Allison many years ago: that if we put the bass driver (and port, if the subwoofer is reflex-loaded) sufficiently close to as many boundaries as possible, the boundary lift can be exploited to achieve a smooth overall bass response.
Figs.2a, b, and c illustrate this by way of computer simulations that assume a point source of sound, three perfectly reflecting room boundaries forming an infinite corner, and a listener located 6.6' (2m) from the side wall and 13.1' (4m) from the wall behind the speaker. In the case of fig.2a, the sound source is positioned 3.3' (1m) away from all three boundaries, as a result of which there are a series of deep notches in the response beginning at 100Hz. If we move the source much closer to the corner, so that it is just 9.4" (24cm) from one wall, 7.5" (19cm) from the other, and 4.7" (12cm) up from the floor—distances that are not unrealistic with a downward-firing subwoofer—we get the much improved result of fig.2b. There is still a deep notch in the response but now it is postponed to over 500Hz, well above the subwoofer's passband, and the response is almost flat to over 100Hz. The problem with corner positioning is that it also excites all the standing-wave modes in the room, which may make the bass boomy and overblown.


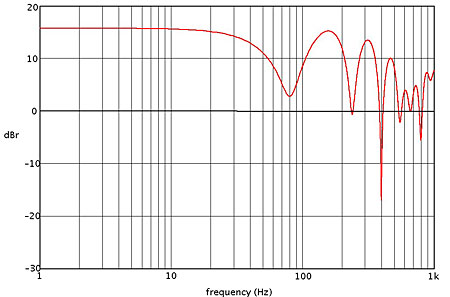
Fig.2: Focal Profile 918 pseudo-anechoic response directly on the tweeter axis combined with nearfield responses of the woofers and port. Grille on.
To avoid this, we can keep the sub close to one wall and the floor, but move it away from the corner along the other wall. In this case we achieve a response something like that in fig.2c—not ideal, but potentially a better compromise.
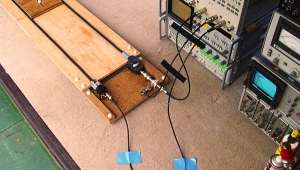
Room modes are, of course, the second effect that must be considered in attempting to achieve a smooth in-room bass response. This isn't a matter of only loudspeaker positioning, but of loudspeaker and listener positioning—the two must be considered together. Determined to keep the undesirable consequences of boundary reinforcement as high in frequency as possible, I placed the subwoofer—a PSW 4000 kindly loaned by KEF—hard into a room corner, and the main speaker, a B&W 805S, on a stand beside it. (All listening was done in mono, for reasons that will become apparent.) I then trawled the room for a listening position at which the room modes had the least untoward effect, using the in-room response captured by DRA-Labs' MLSSA system as a guide.
Measurements
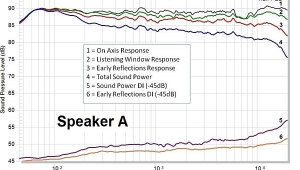
Measuring the PSW 4000 subwoofer's freefield response using Don Keele's nearfield method gave the result shown in fig.3, with the variable-frequency high-pass filter set to its maximum frequency and second-order rolloff rate. (The GRAS 40BE microphone used for this measurement, by the way, has a specified –3dB frequency of 4Hz.) A little judicious guesstimating of the sub's port diameter was necessary to achieve this result, as it so often is with reflex speakers with flared ports: the flare makes it difficult to assess the port diameter and thereby its relative contribution to the output. I was gratified to find that the finalized response was almost exactly 6dB down at 22Hz, in line with KEF's specification.

Fig.3 Measured nearfield response of the KEF PSW 4000 subwoofer used for the listening test.
The next task was to estimate the nominal corner frequency and alignment of the bass rolloff, to allow the LF phase behavior to be calculated. Inspection suggested a C4 alignment with a k value of 0.5, and simulating this with a corner frequency of 32Hz gave an extremely good match with the measured response. Combining this with a second-order Butterworth low-pass filter at 125Hz gave the overall modeled response shown in blue in fig.4—not quite as nicely matched to the measurement through the upper rolloff (probably due to the KEF's filter being frequency-adjustable), but close enough.
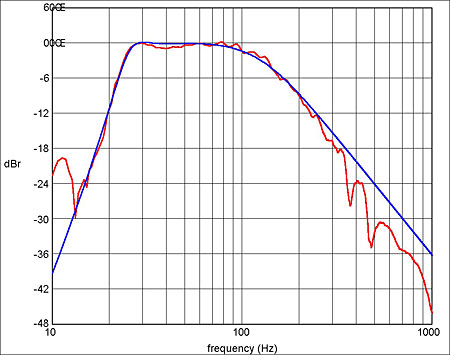
Fig.4 Simulated response of the KEF PSW 4000 subwoofer (blue) used to design the crossover and phase-correction filters.
Crossover filtering to the main speaker was contrived as linear-phase, fourth-order, and applied using a trick called bidirectional filtering, which cannot be used in real-time processing but can when, as here, WAV files have been preprocessed for the listening. By time-reversing the subwoofer feed signal, applying second-order Butterworth low-pass filtering at the same corner frequency as the sub's own low-pass filter, and then restoring the signal to its correct direction, the overall effect was to achieve double-Butterworth linear-phase low-pass filtering of the sub's output. The same trick was then used to filter the signal for the main speaker feed: second-order high-pass filtering was first applied to the signal in the forward direction, then the signal was reversed and the filtering applied a second time. The result was a linear-phase version of the Linkwitz-Riley crossover alignment.
Reverse-time filtering was also used to apply LF phase correction to the subwoofer signal. Infinite impulse response (IIR) digital filtering cannot be used for this purpose in real-time processing because the resulting filter is unstable. But applying second-order IIR all-pass filtering in the reverse-time direction achieves almost the desired result (fig.5).

Fig.5 Simulated phase response of the KEF PSW 4000 subwoofer's high-pass rolloff (blue) and of the second-order all-pass filter that was used to correct it (red) by passing the subwoofer feed signal through it time-reversed.
The listening position that I eventually settled on elicited the in-room frequency response from the PSW 4000 shown in fig.6. This is remarkably flat but for the peak at 36Hz, which is actually due to two prominent room modes: one at 36Hz, the other at 41Hz. When it became obvious that I wasn't able to suppress these and maintain a flat overall in-room response, I began to wish that I'd borrowed one of Meridian's processors with room-correction capability (see Kal Rubinson's "Music in the Round" elsewhere in this issue.—Ed.). But, as we'll see in a moment, the chosen music excerpt for the listening has little in the way of instrument fundamentals down at this frequency, and listening confirmed that these room modes were therefore not a significant problem. In fact, prior to phase equalization, the test setup produced easily the deepest, cleanest bass I have ever achieved—just as I'd hoped.
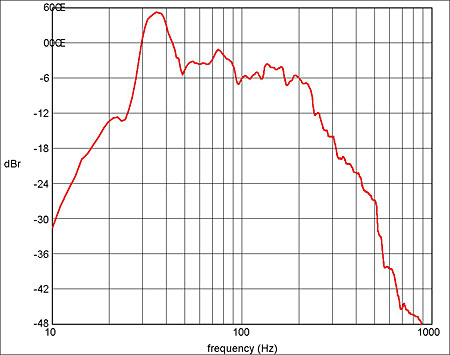
Fig.6 Measured in-room response of the KEF PSW 4000 subwoofer from the chosen listening position. The response is remarkably flat through the passband except for the effect of prominent room modes at 36 and 41Hz.
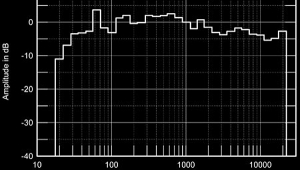
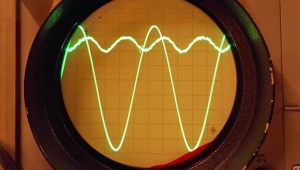
The issue of what recording to use for a listening test of this nature is an important one: You don't want to use material that has passed through an unknown number of high-pass filters in the course of production, and so has significant LF phase distortion locked in. JA helped me out here with a two-minute, 24-bit/48kHz, direct-injected recording of him playing a Rickenbacker bass guitar. As well as having good LF bandwidth with no sign of LF filtering, as the spectral analysis in fig.7 shows, this recording also contains medium-fast runs as well as sustained notes, which makes it good for assessing bass transient performance.

Fig.7 Average (blue) and peak (red) spectra of the mono DI direct-injected bass guitar recording used for the listening. Both spectra are well maintained to infrasonic frequencies.
Listening
With the processed files authored to DVD-R using Minnetonka's discWelder Chrome II DVD-Audio authoring software, I settled down to compare the sound of JA's bass playing conveyed by the baseline combination of PSW 4000 and 805S with that of the files processed to cancel the sub's phase distortion. As a source, I used Max Townshend's fine TA 565CD universal player, which is a thorough reworking of a Pioneer machine.
As I pressed Play, I didn't know what to expect: a mild improvement or a revelation. To use a curry-house analogy, I was half-prepared for korma rather than phal. But when I compared the unprocessed and phase-corrected tracks, it took only a few seconds of the latter to persuade me that here was a significant improvement. Just as Michael Gerzon described, the phase-corrected sound was both weightier and punchier, and distinctly more coherent. It simply sounded more like a bass guitar, to the extent that I almost hummed along—not something that I would normally expect to do when listening to a bass-guitar accompaniment shorn of all else (sorry, John), and certainly not an urge I felt with the unprocessed track.
Still, time-consuming as it was, this experiment involved only a single music excerpt and was conducted in mono, and so hardly offers a comprehensive insight into the full benefit of bass phase correction. But what I heard convinces me that this is an area in which the application of DSP can make a significant contribution to fidelity. The question I haven't addressed, but will, is whether this can be achieved by the KEF method of equalizing the amplitude response for a much lower corner frequency, or whether Gerzon is right that phase compensation per se is better.
The two options deserve separate consideration because they have different pros and cons. Pushing the bass corner frequency down into infrasonic territory with a shelf filter, as KEF did, has the advantage that it can be achieved using either an analog filter or a simple IIR digital filter. It also shifts the ringing associated with the LF rolloff to an infrasonic frequency. The downside of this approach is that it doesn't banish phase distortion completely, and potentially requires substantially more amplifier power—but only if the speaker's inherent corner frequency is high enough that the LF boost significantly amplifies low-frequency components within the music. As Bob Stuart of Meridian has shown, provided the speaker has a sufficiently low corner frequency to begin with, the power requirement is increased only a little because of the declining spectral content of music at low frequencies (footnote 4).
Correcting a speaker's LF phase distortion while leaving its amplitude response unchanged demands, if it is to be achieved in real time, quite a long finite impulse response (FIR) digital filter. The disadvantage of this, setting aside computational costs, is that it adds significant latency or processing time, which becomes a particular problem if the sound accompanies a moving picture. Video buffering will then be required to maintain sync with the sound, and video memory is expensive. On this basis alone, the KEF approach looks preferable.
But does it sound as good as Gerzon's favored phase correction? As soon as I've found out, I'll let you know.
Footnote 4: J. Robert Stuart, "Active Loudspeakers," AES 21st UK Conference, April 2006.
|
| |||||||||
- Log in or register to post comments




























| Loudspeakers Amplification Digital Sources | Analog Sources Accessories Featured | Music Columns Retired Columns | Show Reports | Features Latest News Community | Resources Subscriptions |
 © 2024 Stereophile
© 2024 StereophileAVTech Media Americas Inc., USA
All rights reserved

